Correlazione FEM-Test di un robot manipolatore
Il problema
Quando si realizza il prototipo di un sistema complesso, come quello di un robot manipolatore, esistono aspetti di calibrazione che derivano dalla sfera meccanica e altri da quella del sistema di controllo.
Per riuscire a creare il Digital Twin del prodotto in grado di prevedere con accuratezza le condizioni di funzionamento è necessario passare da una fase sperimentale che permetta di caratterizzare i parametri meccanici del sistema e ridurre il numero di incognite in gioco.
Questo viene fatto attraverso uno studio di correlazione FEM-Test tra il modello matematico e quello sperimentale, ovvero le due facce del “gemello digitale”.
La sfida
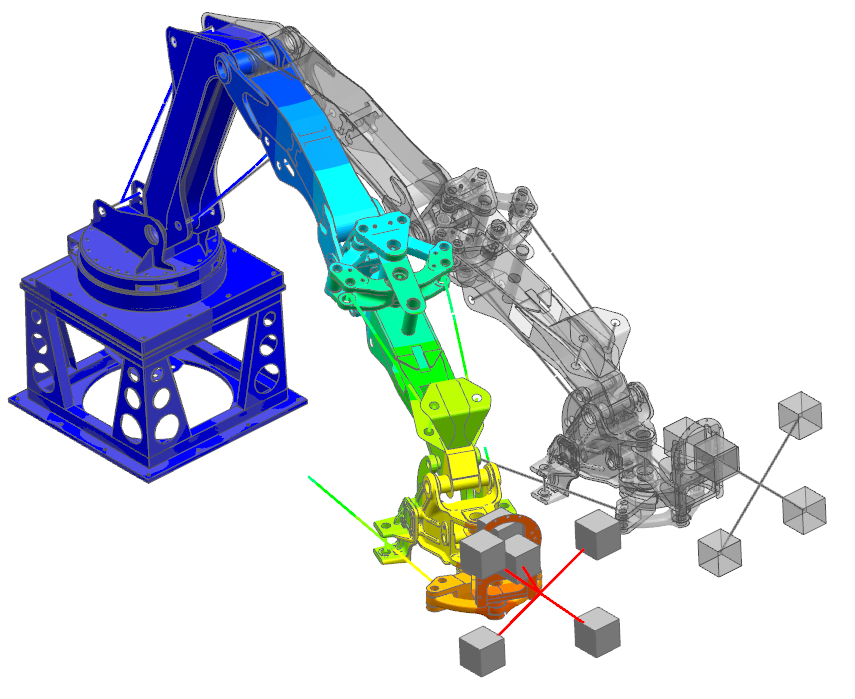
SmartCAE ha collaborato alla realizzazione del modello ad elementi finiti validato di un robot manipolatore per determinarne le caratteristiche modali.
Il fine ultimo del progetto è stato quello di verificare e validare il modello analitico con le misure di analisi modale sperimentale (EMA).
Questa operazione risulta fondamentale per realizzare un modello analitico in grado di prevedere il comportamento reale del prodotto nelle condizioni di funzionamento.
Il nostro contributo
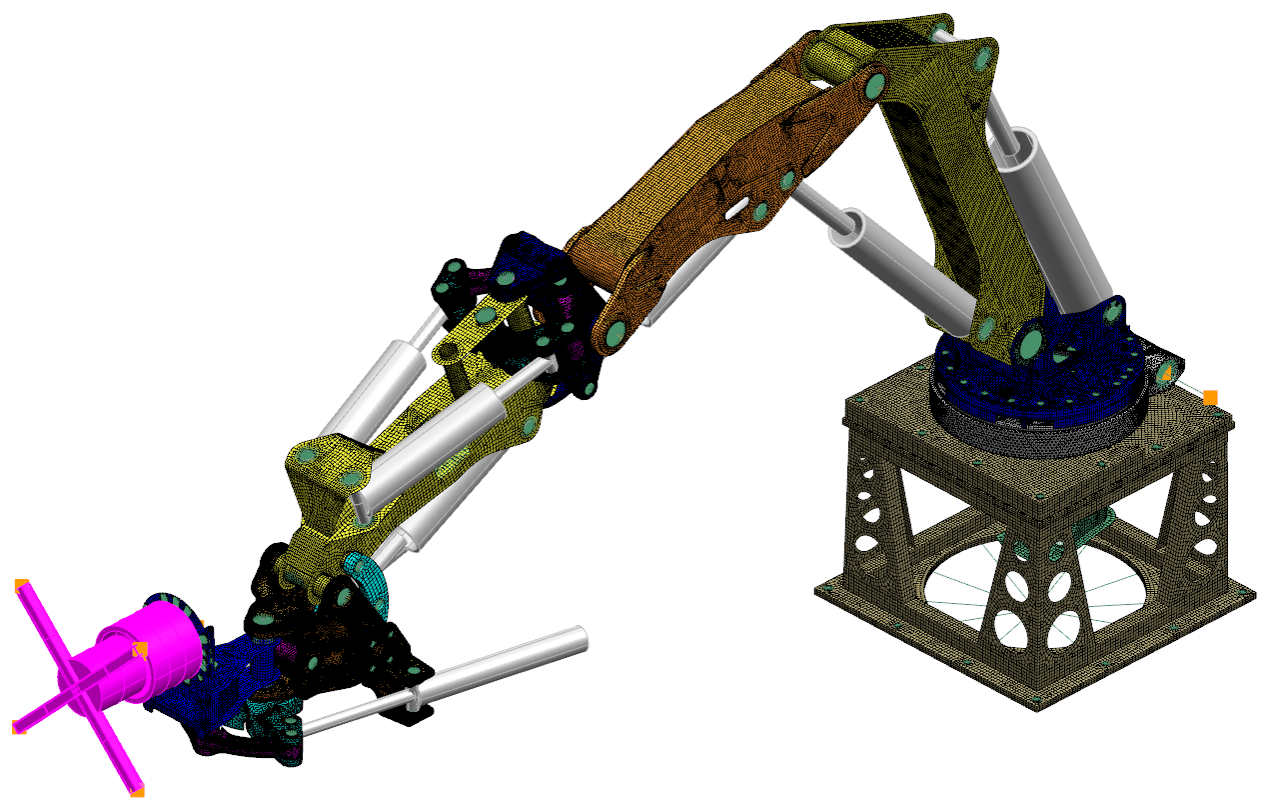
Partendo dalla geometria 3D del robot manipolatore ci siamo occupati della fase di realizzazione del modello ad elementi finiti, con particolare attenzione alla gestione dei giunti della catena cinematica.
Successivamente abbiamo condotto la campagna di misura per la determinazione delle frequenze di risonanza e dei modi propri del robot. L’attività è stata condotta con il manipolatore posizionato in varie configurazioni geometriche, per ottenere delle misure affidabili.
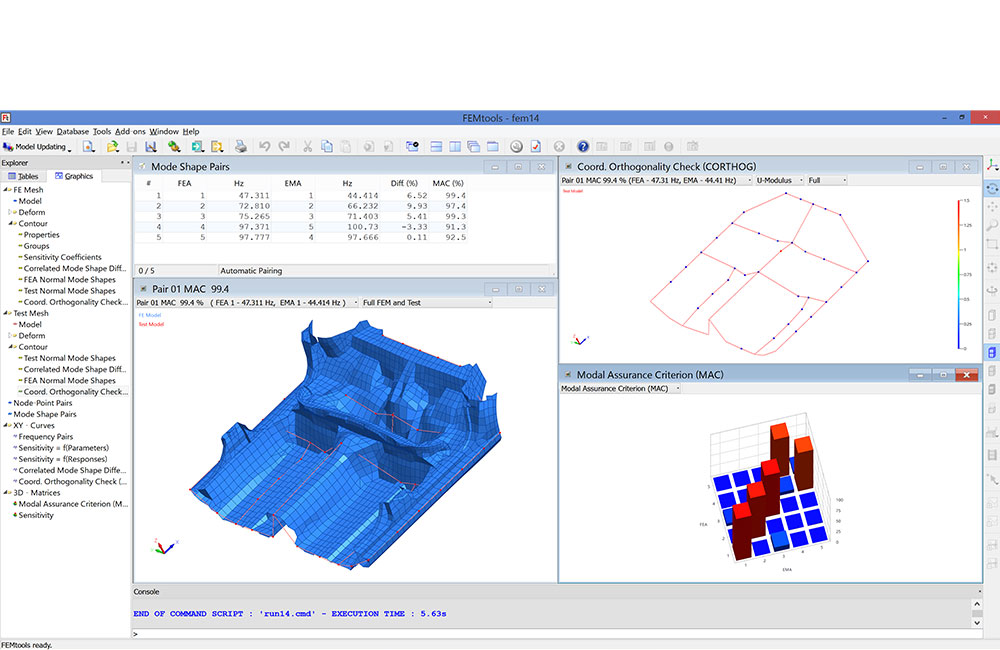
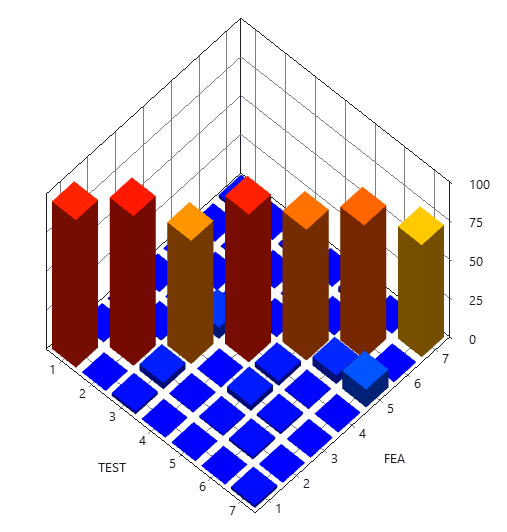
In ultimo, ci siamo occupati della verifica e validazione del modello FEM, mediante analisi di correlazione e model updating. Attraverso software specialistico sono state calibrate le rigidezze dei giunti e le proprietà del modello FEM, ottenendo un’ottima corrispondenza tra le simulazioni e le misure sperimentali.
I benefici per il cliente
L’esperienza ventennale di SmartCAE nella modellazione ad elementi finiti, unita alla profonda conoscenza delle problematiche della correlazione delle risposte dinamiche, ha permesso al cliente di avere un interlocutore unico in grado di supportarlo in tutto il ciclo del progetto: virtuale, sperimentale e validazione.
Grazie al modello validato è stato possibile individuare quali fossero i giunti del robot manipolatore più soggetti a oscillazioni e a errori di posizionamento del manipolatore, per la loro riprogettazione.
Gallery
Verifica il prodotto prima di realizzarlo.
Se ti dicessimo che puoi ridurre i costi dei tuoi prototipi fino all’80% ti interesserebbe saperne di più?
Con la simulazione al calcolatore ti aiutiamo a prevedere il funzionamento del prodotto nelle condizioni di esercizio. Affidati a noi per eliminare gli errori di progettazione e realizzare prodotti funzionanti al primo tentativo! Contattaci adesso per una consulenza gratuita.
Contattaci subitoAnalisi dinamica e vibrazioni NVH
Le analisi dinamiche NVH aiutano a comprendere il comportamento del prodotto e le sue prestazioni meccaniche quando è soggetto a vibrazioni.
Scopri come possiamo aiutarti a individuare e risolvere problemi di vibrazioni sul tuo progetto.
Analisi di correlazione FEM Test
Un aspetto cruciale delle simulazioni riguarda l’affidabilità dei modelli analitici: a causa di approssimazione e incertezze capita che al momento del test di delibera del prodotto, possano manifestarsi differenze tra ciò che è stato simulato e ciò che è stato testato. Attraverso i nostri servizi di correlazione FEM-Test siamo in grado di indicarti come migliorare il livello di accuratezza delle simulazioni.
Software di analisi CAE
Vuoi implementare il Virtual Prototyping nel tuo workflow di progettazione?
Scopri la nostra proposta di software di analisi e di servizi di mentoring. I nostri esperti sono a tua disposizione per aiutarti sia a scegliere la soluzione più adatta alle tue esigenze che a implementarla con successo nel tuo ciclo di progettazione. Contattaci per una valutazione tecnica gratuita.
Tutti i SoftwareSimcenter 3D
Simcenter 3D è un ambiente CAE moderno che permette di valutare rapidamente le prestazioni del prodotto grazie all’unione del potente modellatore geometrico con il pre-processore associativo e solutori multifisici integrati. Simcenter 3D è in grado di eseguire simulazioni con la geometria creata da qualsiasi CAD.
FEMtools
FEMtools è una famiglia di software CAE multi-funzionali, sviluppata da Dynamic Design Solutions che abilitano capacità di analisi e di scripting per le analisi di correlazione tra modelli FEM e misure sperimentali. FEMtools si interfaccia con i software di analisi ad elementi finiti più diffusi e con i principali formati di dato sperimentale.